In this next edition of our OpenStreetMap interview series we speak with DW Innovation about SPOT, their tool for searching geospatial patterns in OpenStreetMap. They share how the project began, the challenges behind building it, and what they have learned since its launch.
1. Who are you and what do you do? What got you into OpenStreetMap?
We are DW Research & Cooperation projects. We research and experiment with new technologies in national and international innovation projects to get a clear picture of how journalism can benefit from those technologies.
In our research domain ‘verification’ we acknowledged that a very time-consuming process is the location verification of digital media. OpenStreetMap is a very interesting source of geolocation data as it contains non-commercial data that is relevant for geolocating digital media.
2. What is SPOT? What prompted you to create it? Why do we need a tool like this?
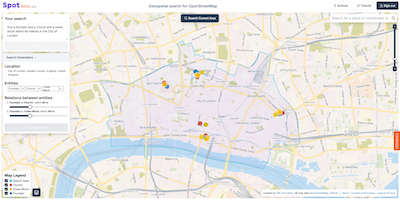
Imagine that you have to verify the location of a picture on which you can see a fountain and a church and a tower block within 60 metres of each other in the City of London. Google Maps won’t be able to help you searching for multiple entities at once, but in OSM you can actually search for geospatial information patterns.
The tool that we previously used for that is Overpass Turbo, however, it was rather complex to use for a lot of journalists. We decided to make searching in OSM easier and build a tool that can translate natural language prompts to search queries for geospatial patterns. The user won’t need to understand OSM tags and descriptors and can just prompt the system in their natural language, for example: ‘find a fountain and a church and a tower block within 60 metres of each other in the City of London’. The result will look like this:
3. What are the unique challenges involved in creating SPOT?
As we started in a world that was just being introduced to LLMs and training them for specific purposes it was quite complex to find the right open source model that would provide us with robust translation of natural language prompts to OSM search queries. We have developed a fine-grained automated benchmarking system that allows us to compare LLM models and measure the impact of fine-tuning.
Another challenge is the tagging system of OSM. We have developed our own descriptor-tag bundle index to try and make sure that we cover any way of searching for e.g. a public bin. We have also clustered visually similar entities, for example all kinds of train rails, due to our geolocation verification use case.
4. SPOT was launched at the end of 2024 launch announcement - what has the response been and what have you learned since then?
SPOT was received very well. The response from the journalistic and OSINT communities is very positive. We started with a Beta version that was not yet very stable. The early users saw the potential, looked through some bugs and provided us with very valuable feedback that allowed us to improve the application. Some, at first sight, minor issues led to insight that created structural changes in the system. Today, we have a well working, stable version that we can build on.
We are still learning that it is not easy to run well engaged open source projects. Building something, making it available for free and asking for input from like-minded is not necessarily the recipe for success. Also free products need to be marketed, also open source projects need to be well-managed and need Product Managers and Product Owners to thrive. We would be very happy to get more engagement from the OSM community, so if you can share the secret for that with us, we’d be much obliged!
5. Recently OpenStreetMap celebrated 20 years. Where do you think the project will be in another 20 years?
Phew, I was never so good at looking into the future. I guess we’ll see the urge and necessity to work on digital sovereignty in the near future. Implementation of that will take a bit. OSM can serve as a great example of how a society can build and own data and applications. OSM could possibly also use this momentum to make a leap and lead the way as a platform independent from state or big tech.
And of course, we would love OSM to be easily searchable for geospatial information patterns by everyone ;)
A big thank you to the team at DW Innovation for sharing their insights on SPOT and their work at the intersection of journalism, verification, and open geodata. We’re excited to see how SPOT and the wider OSM community continue to grow and collaborate in the years ahead.
Forward!
Ed and the OpenCage team
Please let us know if your community would like to be part of our interview series here on our blog. If you are or know of someone we should interview, please get in touch, we’re always looking to promote people doing interesting things with open geo data.